Operator's adaptive calibration of trust in automated vehicles
Rosanne de Feyter (2020) coached by Marieke Martens
Description
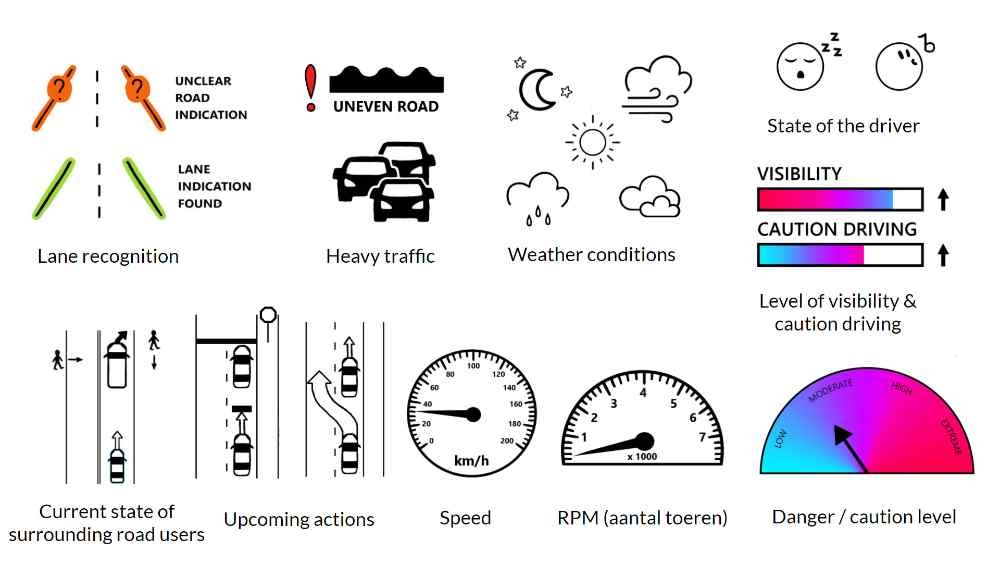
On the road we are seeing more and more smart cars, like Tesla. This company created cars that are capable to drive within their lanes, park by themselves and drive automated. Other companies are following their example and are catching up on automated vehicles fast as well. In this transition to a world with fully self-driving vehicles, one of the biggest obstacles is the trust level of the driver, or, operator. To solve this problem, I designed a user interface that creates a healthy level of trust. The concept offers the operator a completely adjustable interface to fit their personal needs for information. Users can alter the layers of information by either adding, deleting or moving widgets on their interface and on the windshield. These widgets and the concept itself were validated during user tests, which showed that the trust level of operators of automated vehicles increases with this concept.