LiquiVi
Matin Maskitou (2022) coached by Pavlo Bazilinskyy
Description
Nowadays more and more vehicles are provided with automated systems. These Automated Vehicles (AV’s) are being implemented to reduce the number of accidents, make travelling more comfortable and more accessible to those who are unable to drive. Research has shown that acceptance, perceived usefulness and intention to use automated driving technology are strongly modulated by trust. One of the biggest obstacles of the implementation of AV’s is a lack of trust. For AV’s to be accepted there has to be a willingness to use AV’s. Not only because this improves safety but also to ensure a correct use of AV systems.
This project focuses on trust when it comes to the implementation of AV’s. The main goal is to design an internal HMI solution that increases trust levels when it comes to usage of level 3/4 automated vehicles during non-critical driving scenario’s. How can we increase trust levels? and how do we ensure smooth human computer interaction without compromising the benefits of automated systems?
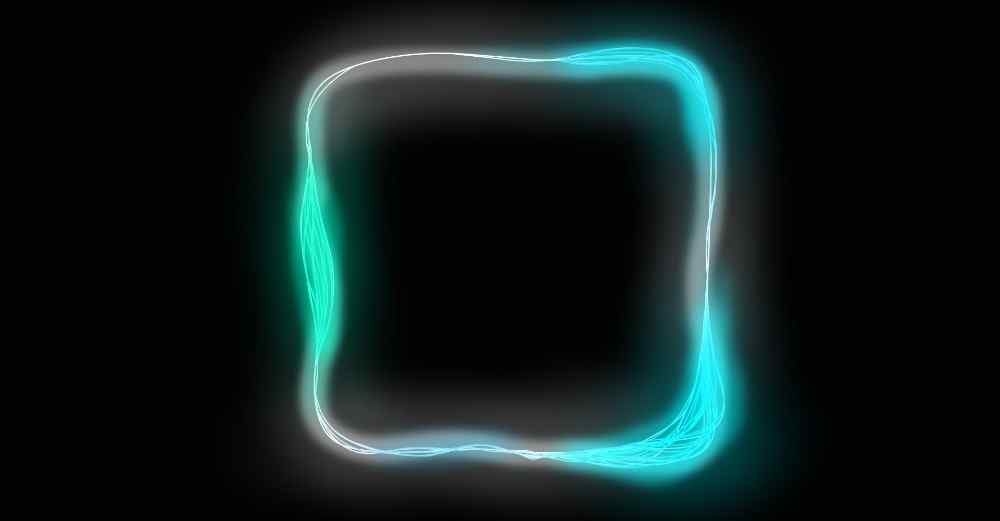
LiquiVi tackles these questions by showing a digital visualization that translates received data from the car and shows the real-time traffic situation around the car. For this, the system uses a liquid animated square with changing modalities being shape, colour and brightness. The display is located on the centre console for it needs to be in the peripheral vision whilst not interfering with non-driving related tasks. Therefore the passengers are at any point in time aware of the situation of the car’s surroundings without shifting their focus from their non-driving related tasks to the display. By being aware of what the car perceives, the passengers feel more comfortable using the automated systems, which increases trust levels and eventually makes it easier for AV’s to be implemented on the road.