Shape-changing omnidirectional AVs
Jilez Aelbers, Bart Arts, Carlos Bernad Thomas, Max Crutzen, Jesper Kapteijns (2020) coached by Marieke Martens
Description
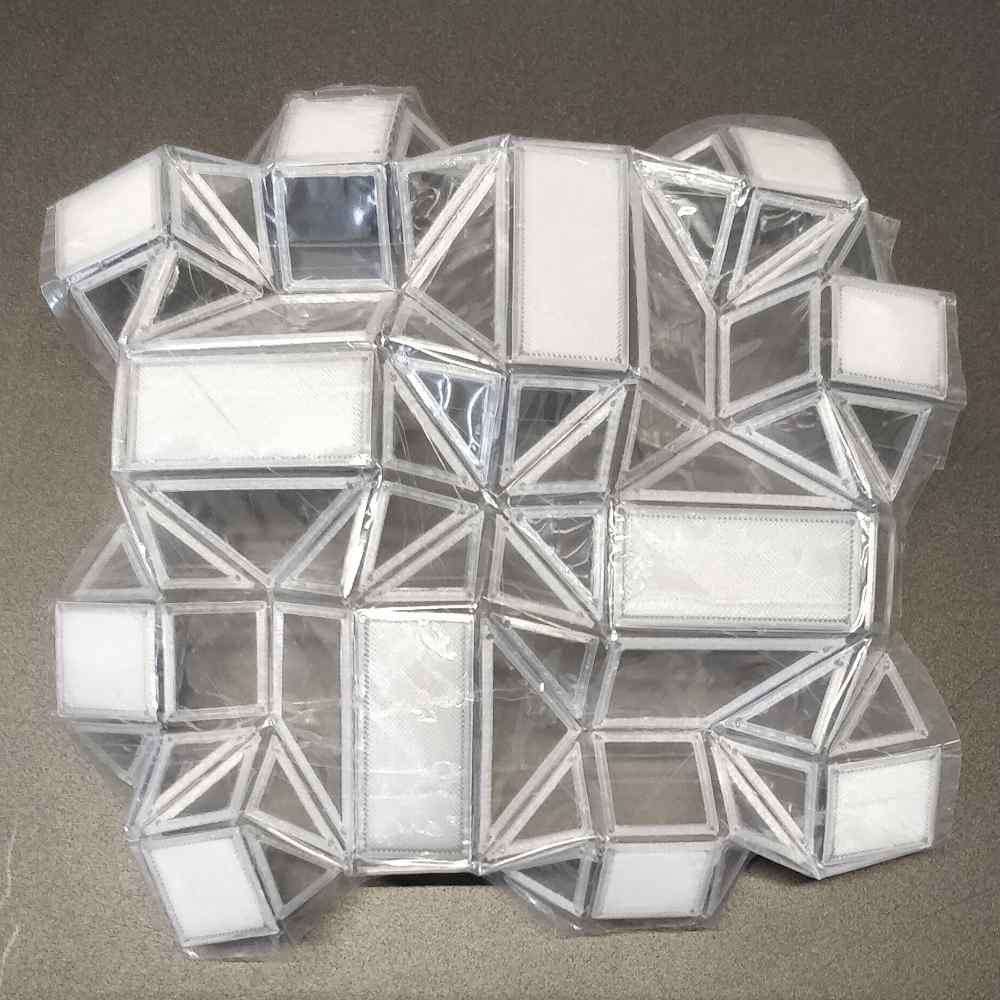
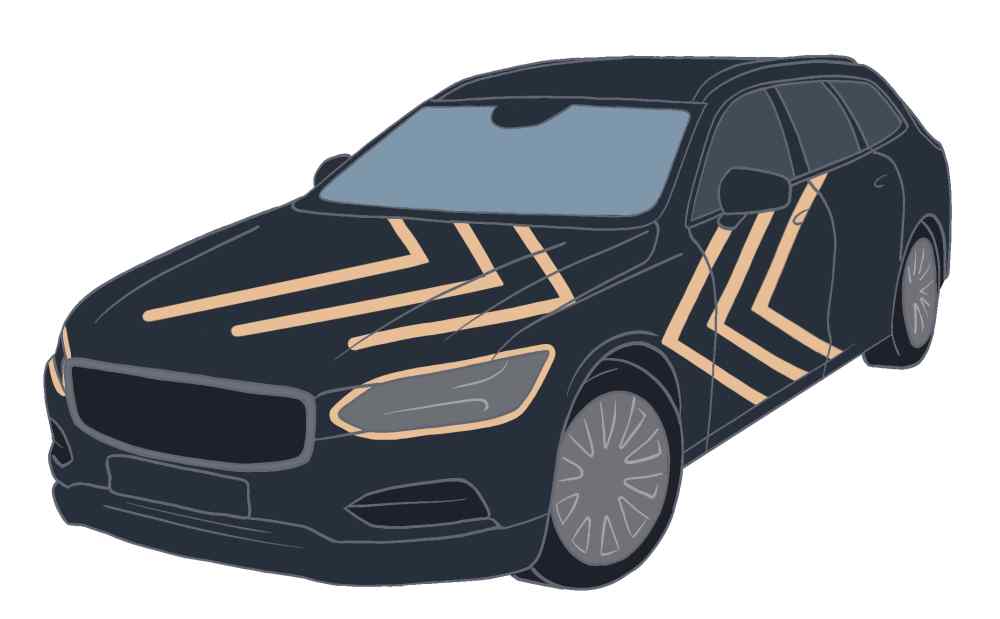
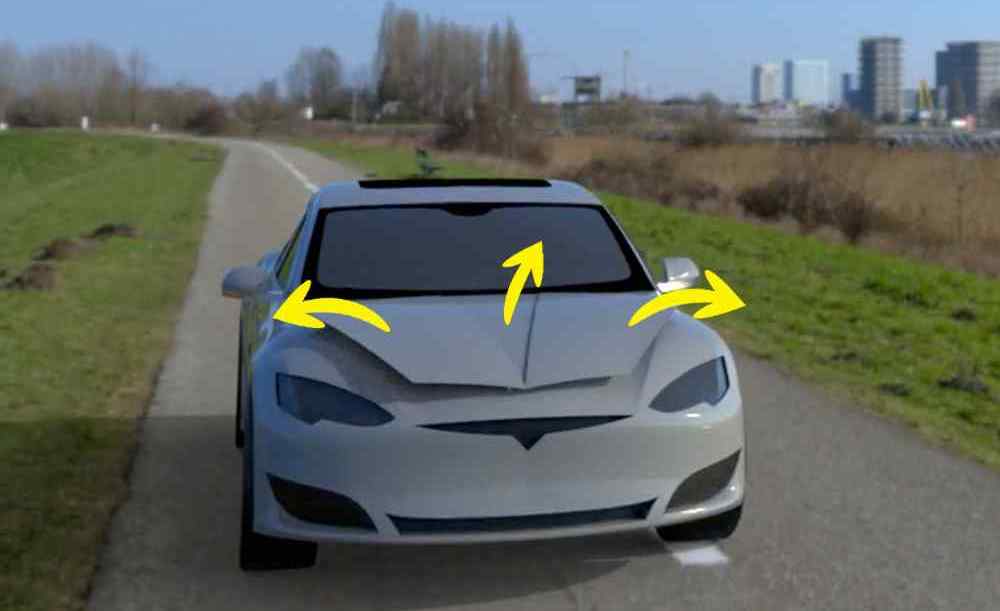
This project is an explorative research about different ways of communicating directions of vehicles in a future with fully vehicle autonomy. Being able to anticipate the direction of a vehicle is key in traffic. We propose the possibility of using shape-change to indicate the direction a vehicle is going in. To explore the possibilities of shape-changing on vehicle, origami was chosen as a possibility. Material research was done and a prototype was created that would be able to fit the needs of a vehicle. This research was moderately successful and with more time, resources and funding, a full-scale version can be created. The potential of shape-change to indicate direction was tested through user research, initially with a questionnaire, and afterwards with semi-structured interviews. A preliminary conclusion can drawn that shape-change, along with other visualisations can potentially indicate direction successfully.